This is a real-time LiDAR odometry system designed for SLAM applications. It utilizes feature extraction from point clouds, iterative closest point (ICP) registration, sliding window optimization with Ceres Solver, and Pangolin for 3D visualization.
The system incorporates Probabilistic Kernel Optimization (PKO) for robust state estimation, as described in:
S. Choi and T.-W. Kim, "Probabilistic Kernel Optimization for Robust State Estimation," IEEE Robotics and Automation Letters, vol. 10, no. 3, pp. 2998-3005, 2025, doi: 10.1109/LRA.2025.3536294.
- ⚡ Real-time LiDAR odometry processing
- 🎯 Feature-based point cloud registration
- 🔧 Ceres Solver-based optimization
- 📈 Adaptive M-estimator for robust estimation (PKO)
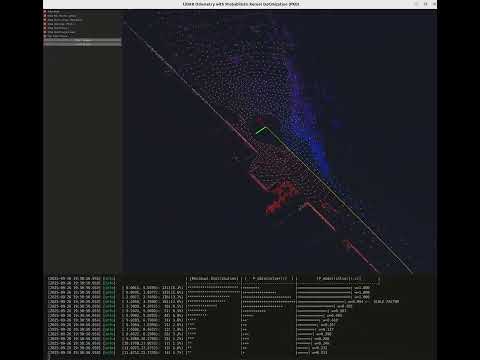
Click to watch the demo video showing real-time LiDAR odometry on KITTI dataset
git clone https://github.com/93won/lidar_odometry
cd lidar_odometry
chmod +x build.sh
./build.shDownload the sample KITTI sequence 07 from Google Drive and extract to data/kitti/
Edit config/kitti.yaml to set your dataset paths:
# Data paths - Update these paths to your dataset location
data_directory: "/path/to/your/kitti_dataset/sequences"
ground_truth_directory: "/path/to/your/kitti_dataset/poses"
output_directory: "/path/to/your/output/directory"
seq: "07" # Change this to your sequence numbercd build
./lidar_odometry ../config/kitti.yamlFor complete evaluation, download the full KITTI dataset from:
- Official Website: http://www.cvlibs.net/datasets/kitti/
- Odometry Dataset: http://www.cvlibs.net/datasets/kitti/eval_odometry.php
app/: Main application and KITTI dataset playersrc/: Core modules (database, processing, optimization, viewer, util)thirdparty/: External libraries (Ceres, Pangolin, Sophus, spdlog)config/: Configuration filesbuild.sh: Build script for native compilation
- PCL (Point Cloud Library)
- Eigen3 - Linear algebra
- Ceres Solver - Non-linear optimization
- Pangolin - 3D visualization
- OpenGL - Graphics rendering
- YAML-cpp - Configuration parsing
- Ubuntu 20.04/22.04 (recommended)
- C++17 Compiler (g++ or clang++)
- CMake (>= 3.16)
This project is released under the MIT License.
@ARTICLE{10857458,
author={Choi, Seungwon and Kim, Tae-Wan},
journal={IEEE Robotics and Automation Letters},
title={Probabilistic Kernel Optimization for Robust State Estimation},
year={2025},
volume={10},
number={3},
pages={2998-3005},
keywords={Kernel;Optimization;State estimation;Probabilistic logic;Tuning;Robustness;Cost function;Point cloud compression;Oceans;Histograms;Robust state estimation;SLAM},
doi={10.1109/LRA.2025.3536294}
}