[Libs] Makes YML config file description more readable#1070
Conversation
|
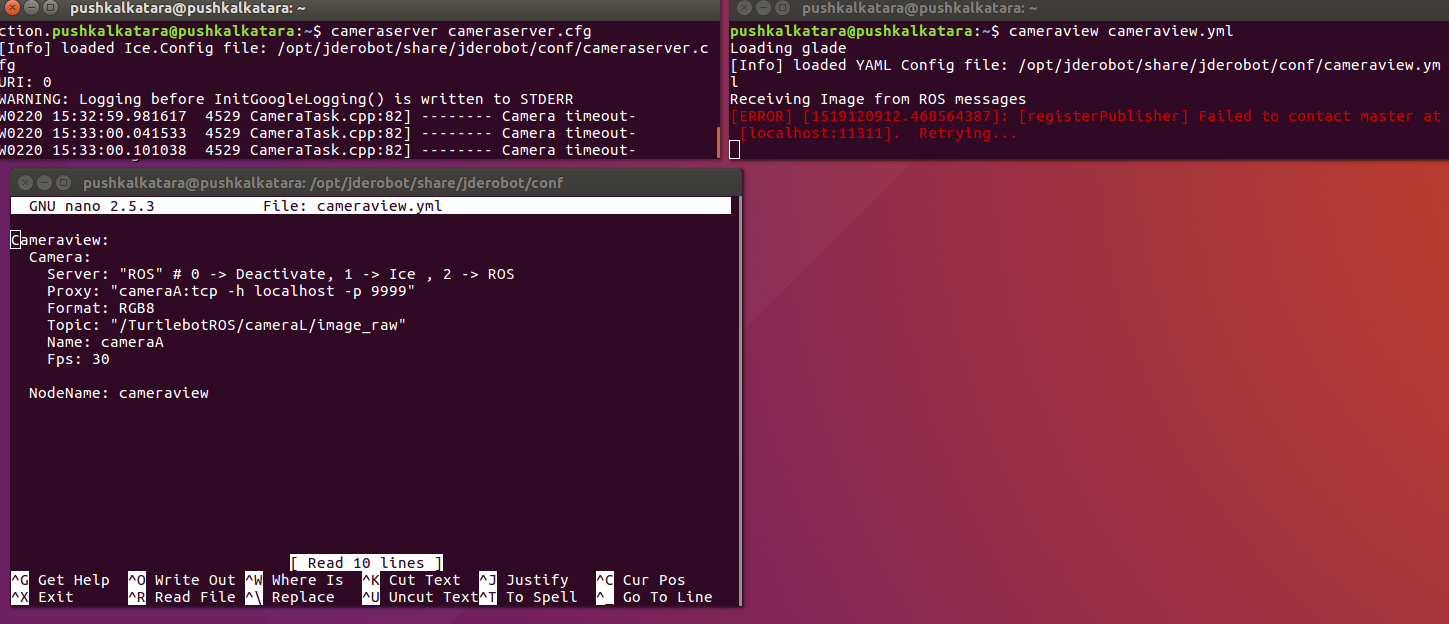
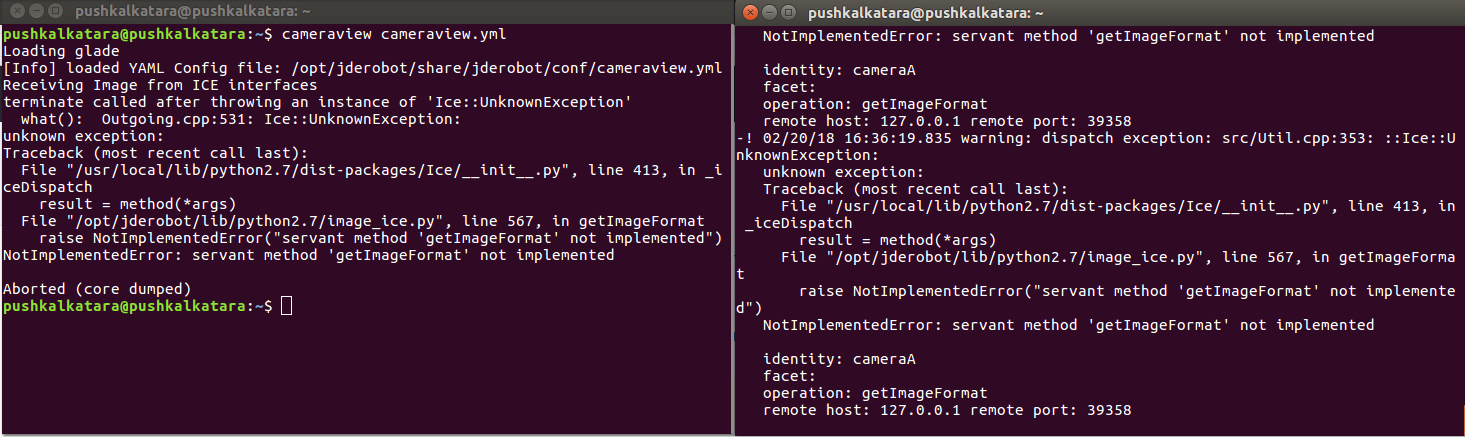
@fqez . Running Python file successfully loads the YML, but further due to i think pip installs wrapper for version 3.7 of Ice but JdeRobot supports 3.6. So after loading the image, error comes - |
 fqez
left a comment
fqez
left a comment
There was a problem hiding this comment.
There's a couple of issues with this PR. Please review them and you are good to go.
Good job!!
| server=1 | ||
| elif server == "ROS": | ||
| server=2 | ||
| else server = 0 |
There was a problem hiding this comment.
you did miss a colon here else: server = 0
| server=1 | ||
| elif server == "ROS": | ||
| server=2 | ||
| else server = 0 |
There was a problem hiding this comment.
you did miss a colon here else: server = 0
Actually you missed that colon in every client, please, review it.
| @@ -1,30 +1,30 @@ | |||
| Camera: | |||
| Server: 1 # 0 -> Deactivate, 1 -> Ice , 2 -> ROS | |||
| Server: "Ice" # Deactivate, Ice , ROS | |||
There was a problem hiding this comment.
We prefer not to have quotes. As easy as possible for the end user :D Server: "Ice" --> Server: Ice
Also, this should be case insensitive (ice, ICE, IcE, Ice, ROS, ros, RoS, rOS, ...)
Please, change this in every yml file!
|
did you run Also we need this feature integrated ASAP (other parts of the project depend on this particular one), so let me know if you can resolve it quickly. If not, I can merge this one in this current state and take care of the remaining problems myself. Good job anyway! :) |
94757c0 to
08f1452
Compare
|
@fqez Thanks for the help.
Please review the changes. |
fqez
left a comment
There was a problem hiding this comment.
Last changes, tested by myself and working!
| ymlNode = self.config.getProperty(prefix) | ||
| for i in ymlNode: | ||
| if type(ymlNode[i]) is dict and ymlNode[i]["Server"] == 1: | ||
| if type(ymlNode[i]) is dict and ymlNode[i]["Server"] == "Ice": |
There was a problem hiding this comment.
You forgot the case sensitiviness here!
| ymlNode = self.config.getProperty(prefix) | ||
| for i in ymlNode: | ||
| if type(ymlNode[i]) is dict and ymlNode[i]["Server"] == 1: | ||
| if type(ymlNode[i]) is dict and ymlNode[i]["Server"] == "Ice": |
| if type(ymlNode[i]) is dict and ymlNode[i]["Server"] == "Ice": | ||
| iceserver = True | ||
| if type(ymlNode[i]) is dict and ymlNode[i]["Server"] == 2: | ||
| if type(ymlNode[i]) is dict and ymlNode[i]["Server"] == "ROS": |
Instead of ``` Server: 1 or Server: 2 ``` Changed to ``` Server: "Ice" or Server: "ROS" ``` Solves issue JdeRobot#1060
08f1452 to
5bcbd22
Compare
|
@fqez Made the changes necessary changes. Good to go! 👍 |
|
There is a conflict with src/drivers/MAVLinkServer/MAVProxy/uav_viewer_py.yml so I can't merge this one automatically. Is it necessary? Solve the conflict, please. :) |
Instead of ``` Server: 1 or Server: 2 ``` Changed to ``` Server: "Ice" or Server: "ROS" ``` Solves issue JdeRobot#1060
|
Everything is now ok! Very nice job @pushkalkatara. We do appreciate your effort. Merging it, thanks!! |
f902dca to
bdb3845
Compare
|
undo the last commit please, you broke it! xD |
|
Sorry some git issues. Squashing my commits |
bdb3845 to
f902dca
Compare
|
Thanks for the merge. 👍 |
Instead of
Changed to
Solves issue #1060
Images to show working -