2024.12.04 - #18 - L3DG, IG-SLAM, ULSR-GS, ROVER, World Labs demo, MVD2, FastSR-NeRF, Zero-to-Hero #20
Description
Interesting papers
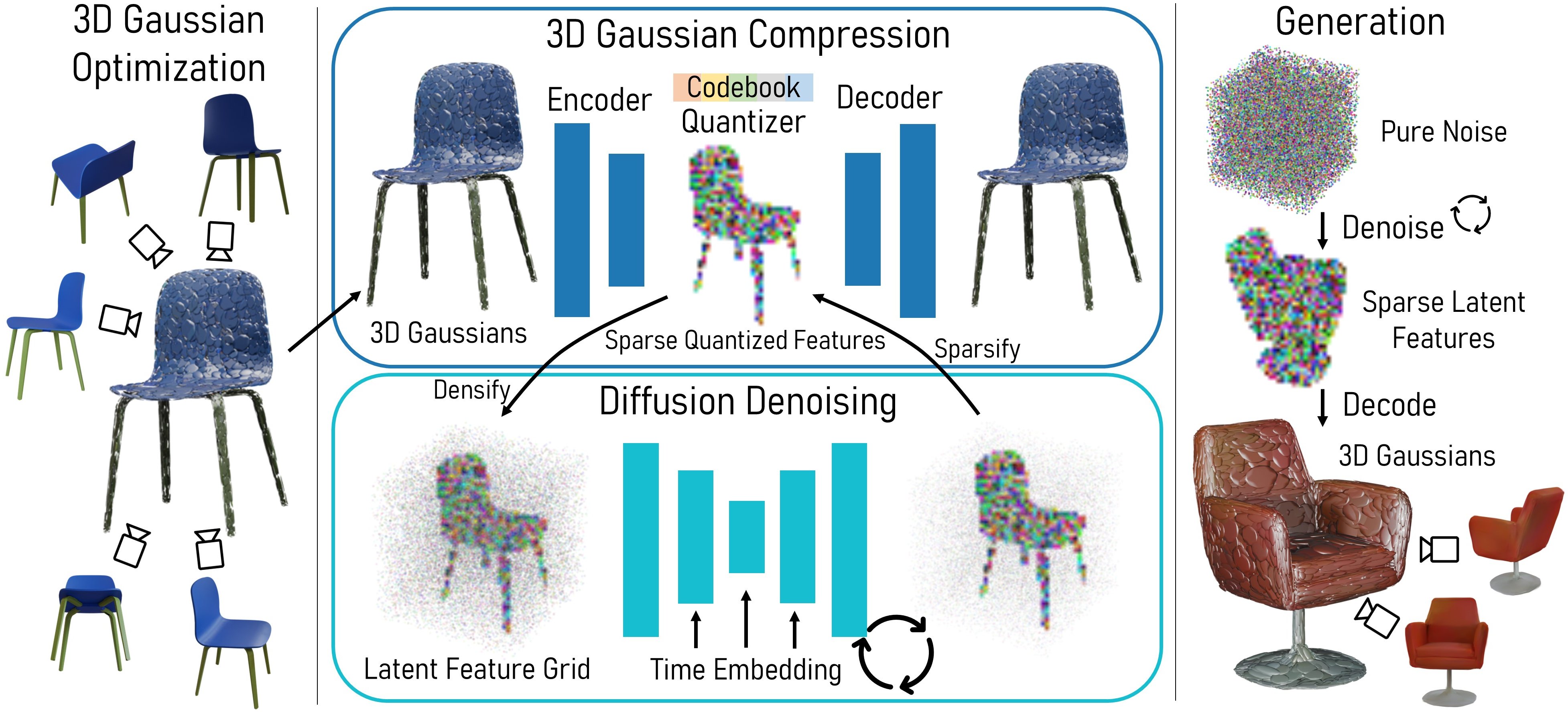
𝐋𝟑𝐃𝐆: 𝐋𝐚𝐭𝐞𝐧𝐭 𝟑𝐃 𝐆𝐚𝐮𝐬𝐬𝐢𝐚𝐧 𝐃𝐢𝐟𝐟𝐮𝐬𝐢𝐨𝐧



IG-SLAM: Instant Gaussian SLAM
- https://arxiv.org/pdf/2408.01126](https://t.co/lj61ZN6RsV
- Dense RGB-only SLAM, 10 FPS
- DROID-SLAM backend (just like Droid-Splat like week!)
- Code: https://github.com/Liouvi/IG-SLAM

ULSR-GS: Ultra Large-scale Surface Reconstruction Gaussian Splatting with Multi-View Geometric Consistency


ROVER: A Multi-Season Dataset for Visual SLAM
- https://arxiv.org/pdf/2412.02506
- 실외 / 잔디깎기 로봇들을 위한 multi-weather 데이터셋


Industry
World Labs demo
- Fei-Fei Li 교수님의 스타트업
- https://youtu.be/9schOFFZtjs?si=pe54HqRnUZ1Y2PYP

박사 지원 팁
CS PhD SOP
- https://cs-sop.notion.site/CS-PhD-Statements-of-Purpose-df39955313834889b7ac5411c37b958d
- 미국/유럽 CS 박사과정 지원 시 SOP 예시 모음
