I just want to utilize the "pointcloud_project_fast" function to project my pure point cloud to 2D image and calculate a loss with ground truth 2D image. But the output of projection is a matrix with every values the same.
This is my test code.
from io_util import *
import numpy as np
from util.pc_util import pointcloud_project_fast, project_loss
from util.gauss_kernel import gauss_smoothen_image, smoothing_kernel, get_smooth_sigma
from util.camera import get_full_camera
from util.config import Config
import tensorflow as tf
import cv2
if __name__ == '__main__':
pc_pl = tf.placeholder(tf.float32, (1, 5745, 3))
camera_pl = tf.placeholder(tf.float32, (1, 4, 4))
config = Config()
kernel = smoothing_kernel(config, get_smooth_sigma(config, 100))
output = pointcloud_project_fast(config, pc_pl, camera_pl, None, None, kernel, None, None)
proj = output["proj"]
proj_depth = output["proj_depth"]
tr_pc = output["tr_pc"]
voxel = output["voxels"]
# proj_loss = project_loss(images, project, 1)
path_gt = "/home/data/03001627_complete/03001627/1a6f615e8b1b5ae4dbbc9440457e303e.pcd"
path_camera = "/home/data/03001627/pose/03001627/1a6f615e8b1b5ae4dbbc9440457e303e/0.txt"
# pt = [1,5745,3] camera=[1,4,4]
pt = np.expand_dims(read_pcd(path_gt), 0).astype(np.float32)
camera = np.expand_dims(load_camera(path_camera), 0).astype(np.float32)
for i in range(camera.shape[0]):
camera[i] = get_full_camera(camera[i])
# print("pointcloud shape ", pt.shape)
# print("camera shape ", cam_matrix.shape)
with tf.Session() as sess:
# sess.run(tf.global_variables_initializer())
out_proj, out_voxel, out_tr_pc = sess.run([proj, voxel, tr_pc], feed_dict={pc_pl: pt, camera_pl: camera})
out_proj = out_proj[0]
out_voxel = out_voxel[0]
out_tr_pc = out_tr_pc[0]
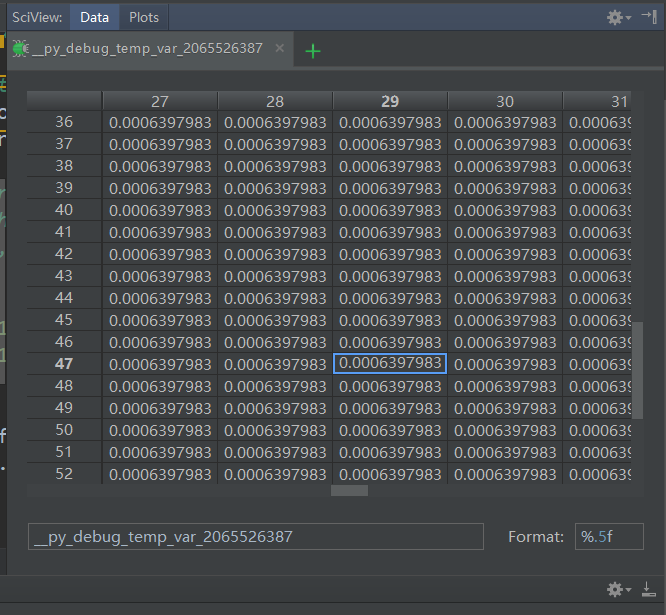
this is the out_proj values.
the input camera is from blender corresponding to image.
self.batch_size=1
self.vox_size = 64
self.vox_size_z = -1
self.pc_normalise_gauss = False
self.pc_normalise_gauss_analytical = True
self.pc_rgb_stop_points_gradient = False
self.pc_separable_gauss_filter = True
self.camera_distance = 2.0 # 1.0?
self.focal_length = 1.875 # 200?
self.pose_quaternion = False
self.pc_rgb_clip_after_conv = False
self.pc_rgb_divide_by_occupancies = False
self.pc_rgb_divide_by_occupancies_epsilon = 0.01
self.ptn_max_projection = False
self.pc_gauss_filter_gt = False
self.pc_gauss_filter_gt_switch_off = False
self.max_number_of_steps = 30000
self.pc_relative_sigma_end = 0.2
self.pc_relative_sigma = 3.0
self.pc_gauss_kernel_size = 21
self.drc_logsum = True
self.drc_logsum_clip_val = 0.00001
self.drc_tf_cumulative = True
self.max_depth=10.0
could u tell me what is wrong. Thank u!
I just want to utilize the "pointcloud_project_fast" function to project my pure point cloud to 2D image and calculate a loss with ground truth 2D image. But the output of projection is a matrix with every values the same.
This is my test code.
this is the out_proj values.

the input camera is from blender corresponding to image.
this is my parameters
could u tell me what is wrong. Thank u!